Lady Bug Note Generators
MEDIDA: Es comparar una cantidad con su unidad, para así tener una cuantificación de variables físicas.
INSTRUMENTO:Equipo creado por el hombre para obtener y cuantificar valores de una variable o de una medida. Ademas con capaces de cuantificar y "ver" lo que el hombre no puede.
INSTRUMENTACIÓN: Es la ciencia que se encarga del análisis de los instrumentos de medición, que mejoran la eficiencia de los mecanismos de percepción del hombre.
VARIABLES ANÁLOGAS: Son aquellas que toman infinitos valores entre dos puntos cualesquiera de la misma.

ARQUITECTURA DE LOS SISTEMAS DE INSTRUMENTACIÓN
Entre las arquitecturas de los sistemas de instrumentación encontramos dos:
CENTRALIZADA: Posee un solo núcleo inteligente
DISTRIBUIDA: Posee varios núcleos inteligentes controlados por otro núcleo inteligente
CARACTERÍSTICAS DE LOS INSTRUMENTOS DE MEDICIÓN
Cuando hablamos de un instrumento debemos tener claro que estos son reales y por ende su comportamiento no es el ideal, pues estos se ven expuestos a ciertos medios que pueden provocar alteraciones en su comportamiento, por tal razón es necesario que conozcamos sus principales características, que pueden ser de tipo estático o de tipo dinámico.
1. TIPO ESTÁTICO: Las características estáticas de los instrumentos de medida son las que aparecen en estos después de que ha pasado mucho tiempo, régimen permanente. Se cuantifica en términos de error. Algunas de estas características encontramos:
 CURVA DE CALIBRACIÓN:Es la curva que relaciona la entrada y salida de un sensor o sistema de medida. Esta posee tres parámetros que definen sus limites, campo o margen de medida(entre el limite superior e inferior se encuentran los valores que se pueden medir);alcance o fondo de escala(es la diferencia entre el limite superior e inferior de medida);salida a fondo de escala(Es la diferencia entre las salidas para los extremos del campo de medida).
CURVA DE CALIBRACIÓN:Es la curva que relaciona la entrada y salida de un sensor o sistema de medida. Esta posee tres parámetros que definen sus limites, campo o margen de medida(entre el limite superior e inferior se encuentran los valores que se pueden medir);alcance o fondo de escala(es la diferencia entre el limite superior e inferior de medida);salida a fondo de escala(Es la diferencia entre las salidas para los extremos del campo de medida).
MARGEN DE MEDIDA: Es el conjunto de valores del mensurando para los que el error de un instrumento de medida se supone comprendido entre los límites especificados.En otras palabras el el límite de valores de medición que un instrumento es capaz de leer. La dimensión que se mide debe ajustar dentro del rango del instrumento.
 SENSIBILIDAD: Cociente del incremento de la respuesta de un instrumento de medida por el incremento correspondiente de la señal de entrada. en la curva de calibración es la pendiente e indica si el dispositivo es lineal o no.
SENSIBILIDAD: Cociente del incremento de la respuesta de un instrumento de medida por el incremento correspondiente de la señal de entrada. en la curva de calibración es la pendiente e indica si el dispositivo es lineal o no.
 REPETIBILIDAD: Aptitud
de un instrumento de medida para dar indicaciones muy próximas durante
la medición repetida del mismo mensurando en las mismas condiciones
de uso. La repetibilidad
puede expresarse cuantitativamente por medio de las características de
dispersión de las indicaciones y se da solo en periodos de tiempos cortos.
REPETIBILIDAD: Aptitud
de un instrumento de medida para dar indicaciones muy próximas durante
la medición repetida del mismo mensurando en las mismas condiciones
de uso. La repetibilidad
puede expresarse cuantitativamente por medio de las características de
dispersión de las indicaciones y se da solo en periodos de tiempos cortos.

CALIBRACIÓN: Consiste en la comparación de valores de medida de un instrumento a calibrar y un instrumento patrón.


Los errores también se pueden clasificar en : graves(humanos),sistemáticos y/o aleatorios.

INSTRUMENTACIÓN ELECTRÓNICA: Es la encargada de cuantificar magnitudes físicas para convertirlas a magnitudes eléctricas que sean útiles a un observador.
VARIABLE: Hace referencia a aquello que esta sujeto a algún cambio
SEÑAL: Es una representación de la información que nos interesa de alguna variable.
TIPOS DE VARIABLES: Las variables se pueden clasificar en:VARIABLES ANÁLOGAS: Son aquellas que toman infinitos valores entre dos puntos cualesquiera de la misma.
VARIABLES DIGITALES: Son
aquellas que constituyen un conjunto finito de valores.
MAGNITUDES Y MEDIDAS
Una magnitud es una propiedad física susceptible a ser medida. A continuación veremos las seis magnitudes físicas existentes.

MAGNITUDES Y MEDIDAS
Una magnitud es una propiedad física susceptible a ser medida. A continuación veremos las seis magnitudes físicas existentes.
MENSURANDO: Magnitud particular sujeta a medición.
SISTEMA DE CONTROL: Un sistema de control es un tipo de sistema que se caracteriza por la presencia de una serie de elementos que permiten influir en el funcionamiento del sistema. La finalidad de un sistema de control es conseguir,mediante la manipulación de las variables de control,un dominio sobre las variables de salida, de modo que estas alcancen unos valores prefijados (consigna).
En los sistemas de control encontramos esencialmente dos:
CONTROL ANÁLOGO: es aquel en que las variables a analizar y procesar son análogas y por ende las ecuaciones y funciones serán continuas.
CONTROL DIGITAL: Es aquel en que las variables a procesar y controlar son digitales.
SISTEMA DE MEDIDA: es una combinación de dos o más elementos con el fin de realizar una o varias funciones para cuantificar la información y pasarla aun observador o a un sistema de control.
Un sistema de medida tiene tres funciones fundamentales que son:
SISTEMA DE MEDIDA: es una combinación de dos o más elementos con el fin de realizar una o varias funciones para cuantificar la información y pasarla aun observador o a un sistema de control.
Un sistema de medida tiene tres funciones fundamentales que son:
ADQUISICIÓN DE LA SEÑAL: Se realiza a través de sensores para convertir una magnitud física a una señal eléctrica. Dentro de la adquisición de la señal está presente el análisis y acondicionamiento de la señal, para lo cual se realiza una o varias de las siguientes funciones.

PROCESAMIENTO DE LA SEÑAL: Es la selección y manipulación de los datos provenientes de la adquisición.
DISTRIBUCIÓN DE LA SEÑAL: Es la presentación de la señal a un observador a través de dispositivos de visualización, almacenamiento o la transmisión a otro sistema de control.
PROCESAMIENTO DE LA SEÑAL: Es la selección y manipulación de los datos provenientes de la adquisición.
DISTRIBUCIÓN DE LA SEÑAL: Es la presentación de la señal a un observador a través de dispositivos de visualización, almacenamiento o la transmisión a otro sistema de control.
ARQUITECTURA DE LOS SISTEMAS DE INSTRUMENTACIÓN
Entre las arquitecturas de los sistemas de instrumentación encontramos dos:
CENTRALIZADA: Posee un solo núcleo inteligente
DISTRIBUIDA: Posee varios núcleos inteligentes controlados por otro núcleo inteligente
CARACTERÍSTICAS DE LOS INSTRUMENTOS DE MEDICIÓN
Cuando hablamos de un instrumento debemos tener claro que estos son reales y por ende su comportamiento no es el ideal, pues estos se ven expuestos a ciertos medios que pueden provocar alteraciones en su comportamiento, por tal razón es necesario que conozcamos sus principales características, que pueden ser de tipo estático o de tipo dinámico.
1. TIPO ESTÁTICO: Las características estáticas de los instrumentos de medida son las que aparecen en estos después de que ha pasado mucho tiempo, régimen permanente. Se cuantifica en términos de error. Algunas de estas características encontramos:
CURVA DE CALIBRACIÓN:Es la curva que relaciona la entrada y salida de un sensor o sistema de medida. Esta posee tres parámetros que definen sus limites, campo o margen de medida(entre el limite superior e inferior se encuentran los valores que se pueden medir);alcance o fondo de escala(es la diferencia entre el limite superior e inferior de medida);salida a fondo de escala(Es la diferencia entre las salidas para los extremos del campo de medida).MARGEN DE MEDIDA: Es el conjunto de valores del mensurando para los que el error de un instrumento de medida se supone comprendido entre los límites especificados.En otras palabras el el límite de valores de medición que un instrumento es capaz de leer. La dimensión que se mide debe ajustar dentro del rango del instrumento.
SENSIBILIDAD: Cociente del incremento de la respuesta de un instrumento de medida por el incremento correspondiente de la señal de entrada. en la curva de calibración es la pendiente e indica si el dispositivo es lineal o no.
LINEALIDAD: Es el grado en que el diagrama de una estimulación de entrada, comparado con el diagrama de la respuesta a esta estimulación vista en la salida, se aproxima a una línea recta.
SATURACIÓN: Es el área en la cual el instrumento ha sobrepasado su capacidad máxima de operación por lo que se presenta un comportamiento distinto a la operación normal y por lo tanto no confiable.
ESTABILIDAD: Es la aptitud de un instrumento de medida para conservar constantes sus características metrológicas a lo largo del tiempo. La estabilidad puede expresarse cuantitativamente de varias formas,por ejemplo: por la variación de una característica en el curso de un periodo de tiempo dado.
EXACTITUD: Se refiere a que tan cerca del valor real se encuentra el valor medido.

PRECISIÓN: Se refiere a la dispersión del conjunto de valores obtenidos de mediciones repetidas de una magnitud. Cuanto menor es la dispersión mayor la precisión.

PRECISIÓN: Se refiere a la dispersión del conjunto de valores obtenidos de mediciones repetidas de una magnitud. Cuanto menor es la dispersión mayor la precisión.
REPRODUCIBILIDAD: Grado de concordancia entre los resultados de las mediciones del mismo mensurando, mediciones efectuadas bajo diferentes condiciones de medida. Ésta se da en periodos largos de tiempo.
ZONA MUERTA: Máximo
intervalo en cuyo interior puede hacerse variar la señal de entrada en los dos
sentidos sin provocar una variación de la respuesta de un instrumento de
medida. Algunas veces, la zona muerta se aumenta deliberadamente
para evitar las variaciones de la respuesta debidas a pequeñas variaciones de
la señal de entrada.
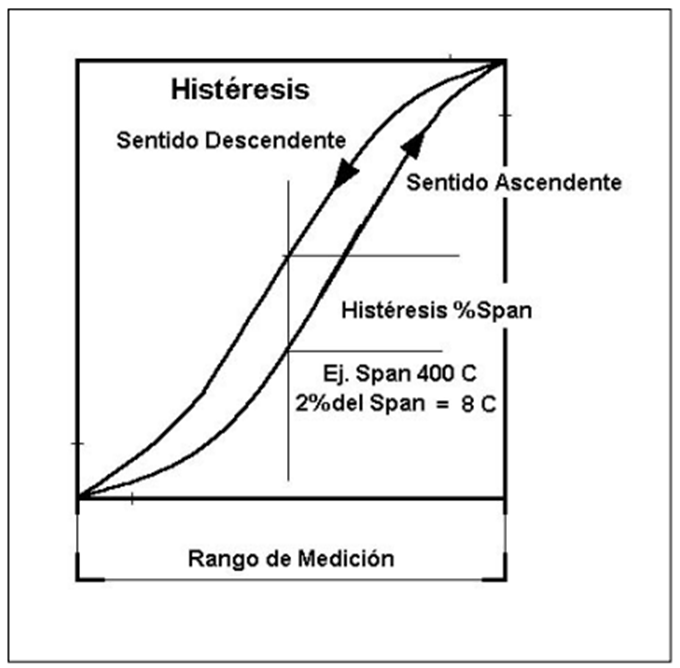
HISTÉRISIS: Es la diferencia que se obtiene en la respuesta del
instrumento de medida en función del sentido en que se ha alcanzado la magnitud que se mide.
DERIVA: La deriva de un instrumento es la variación o fluctuación de su curva de transferencia a lo largo del tiempo.

RESOLUCIÓN: La
menor diferencia de indicación de un dispositivo visualizador que puede
percibirse de forma significativa.Para
un dispositivo visualizador digital, diferencia de la indicación que
corresponde al cambio de una unidad en la cifra menos significativa.
GAMA:La gama de un instrumento se define como la diferencia entre la indicación mayor y la menor que puede ofrecer el instrumento.
ESCALA: Son los diferentes intervalos en los que se puede dividir la gama de algún instrumento.Un instrumento puede tener una o varias escalas.
CALIBRACIÓN: Consiste en la comparación de valores de medida de un instrumento a calibrar y un instrumento patrón.
CALIBRACIÓN A PUNTO: consiste en corregir el error de calibración en un punto concreto para que la salida sea la mas exacta posible.
CALIBRACIÓN DEL CERO Y LA SENSIBILIDAD: Es corregir el error de cero y de sensibilidad.
ERROR DE CERO: Aun cuando el valor de la variable del proceso esté en el mínimo del rango, donde la salida del instrumento debe ser el valor asociado al cero del rango, el instrumento marca a su salida un valor distinto de cero. Ese valor es el error de cero.
ERROR DE SENSIBILIDAD:Es cuando se presenta una deriva o variación de la sensibilidad del elemento primario.
Los errores de una magnitud se pueden cuantificar o expresar mediante los errores absolutos o relativos.
ERROR ABSOLUTO: Es igual a la imprecisión que acompaña a la medida. Nos da idea de la sensibilidad del aparato o de lo cuidadosas que han sido las medidas por lo poco dispersas que resultaron. El error absoluto nos indica el grado de aproximación y da un indicio de la calidad de la medida.

El conocimiento de la calidad se complementa con el error relativo.
ERROR RELATIVO: Es el cociente entre el error absoluto y el que damos como representativo.

2. TIPO DINÁMICO: Las características dinámicas se presentan en la respuesta de los instrumentos a un cambio brusco en su entrada, régimen transitorio, estas características están representadas por el error dinámico y por la velocidad de respuesta. Se dividen en dos grupos:
a) REPUESTA TEMPORAL
CONSTANTE DE TIEMPO: Se define la constante de tiempo, τ , como el tiempo que tarda el sistema en alcanzar el 63,2 % de su valor final.
TIEMPO DE LEVANTAMIENTO: Se define el tiempo de establecimiento, ts, como el que necesita el sistema para alcanzar el régimen permanente. El valor de la señal del permanente no es exactamente el valor final.
SOBREOSCILACIÓN: Hay sobreoscilación si el factor de amortiguamiento está entre 0.707 y 0. La sobreoscilación se dará en el tiempo de tipo, tp, y corresponderá con el valor ponderado
entre la máxima amplitud respecto al valor de salida en el régimen permanente.
b) RESPUESTA FRECUENCIAL:
 ANCHO DE BANDA: El ancho de banda (0 - BW) es el rango de frecuencias en la cual H( jw) no cae al 70’7% , o -3dB por debajo de su valor en la frecuencia cero. Da una indicación de las propiedades de respuesta transitoria en el dominio del tiempo de un sistema de control. Un ancho de banda grande corresponde a un tiempo de levantamiento corto; en cambio, un ancho de banda pequeño tendrá una respuesta en el tiempo más lenta.
ANCHO DE BANDA: El ancho de banda (0 - BW) es el rango de frecuencias en la cual H( jw) no cae al 70’7% , o -3dB por debajo de su valor en la frecuencia cero. Da una indicación de las propiedades de respuesta transitoria en el dominio del tiempo de un sistema de control. Un ancho de banda grande corresponde a un tiempo de levantamiento corto; en cambio, un ancho de banda pequeño tendrá una respuesta en el tiempo más lenta.
FRECUENCIAS DE CORTE: Se denomina frecuencia de corte a la frecuencia BW en la cual la magnitud de respuesta en frecuencia en lazo cerrado esta a 3 dB por debajo de su valor de frecuencia cero.
DISTORSIÓN ARMÓNICA TOTAL: Cuando una señal excita un circuito no lineal, en la salida aparecen armónicas de esa misma señal que provocan que a la salida del circuito aparezca deformada.
Las características dinámicas se dan en los sistemas de orden cero, primer orden y segundo orden.
SISTEMAS DE ORDEN CERO: La relación entrada-salida está caracterizada por la ecuación y(t)=kx(t); así su comportamiento
se caracteriza por su Sensibilidad Estática, s=[dy(t)/dx(t)]=k, que se mantiene constante con independencia de las variaciones de entrada. El error dinámico y el retardo son nulos. Un sistema sólo es de orden cero si no posee ningún elemento almacenador de energía
SISTEMAS DE PRIMER ORDEN: Un sistema de primer orden es aquel cuya salida y(t) puede ser modelada por una ecuación de primer orden, ya que posee un elemento almacenador de energía y otro que la disipa. Estos circuitos presentan una función de transferencia G(s)= N(s)/(s+a).
SISTEMAS DE SEGUNDO ORDEN: Estos sistemas poseen 2 elementos que almacenan energía y otro(s) que la disipan. Tiene diferentes respuesta a una entrada, estas respuestas se clasifican segun la inercia y el tipo de amortiguamiento. A continuación veremos los tres casos:
CASO 1: SISTEMA SOBREAMORTIGUADO: son los que tienen una respuesta mas lenta.


CASO 3: SISTEMA CRÍTICAMENTE AMORTIGUADO: Su tiempo de respuesta es un poco mas rápido que el del sobreamortiguado.

El factor de amortiguamiento es el que indica que tipo de respuesta es la que presenta el sistema. A continuación un diagrama de polos dependiendo del valor de este factor.

Las características tanto estáticas como dinámicas de los instrumentos presentan errores de tipo estático o dinámico.
ERROR DE SENSIBILIDAD:Es cuando se presenta una deriva o variación de la sensibilidad del elemento primario.
Los errores de una magnitud se pueden cuantificar o expresar mediante los errores absolutos o relativos.
ERROR ABSOLUTO: Es igual a la imprecisión que acompaña a la medida. Nos da idea de la sensibilidad del aparato o de lo cuidadosas que han sido las medidas por lo poco dispersas que resultaron. El error absoluto nos indica el grado de aproximación y da un indicio de la calidad de la medida.
El conocimiento de la calidad se complementa con el error relativo.
ERROR RELATIVO: Es el cociente entre el error absoluto y el que damos como representativo.
2. TIPO DINÁMICO: Las características dinámicas se presentan en la respuesta de los instrumentos a un cambio brusco en su entrada, régimen transitorio, estas características están representadas por el error dinámico y por la velocidad de respuesta. Se dividen en dos grupos:
a) REPUESTA TEMPORAL
CONSTANTE DE TIEMPO: Se define la constante de tiempo, τ , como el tiempo que tarda el sistema en alcanzar el 63,2 % de su valor final.
TIEMPO DE LEVANTAMIENTO: Se define el tiempo de establecimiento, ts, como el que necesita el sistema para alcanzar el régimen permanente. El valor de la señal del permanente no es exactamente el valor final.
SOBREOSCILACIÓN: Hay sobreoscilación si el factor de amortiguamiento está entre 0.707 y 0. La sobreoscilación se dará en el tiempo de tipo, tp, y corresponderá con el valor ponderado
entre la máxima amplitud respecto al valor de salida en el régimen permanente.
b) RESPUESTA FRECUENCIAL:
FRECUENCIAS DE CORTE: Se denomina frecuencia de corte a la frecuencia BW en la cual la magnitud de respuesta en frecuencia en lazo cerrado esta a 3 dB por debajo de su valor de frecuencia cero.
DISTORSIÓN ARMÓNICA TOTAL: Cuando una señal excita un circuito no lineal, en la salida aparecen armónicas de esa misma señal que provocan que a la salida del circuito aparezca deformada.
Las características dinámicas se dan en los sistemas de orden cero, primer orden y segundo orden.
SISTEMAS DE ORDEN CERO: La relación entrada-salida está caracterizada por la ecuación y(t)=kx(t); así su comportamiento
se caracteriza por su Sensibilidad Estática, s=[dy(t)/dx(t)]=k, que se mantiene constante con independencia de las variaciones de entrada. El error dinámico y el retardo son nulos. Un sistema sólo es de orden cero si no posee ningún elemento almacenador de energía
SISTEMAS DE PRIMER ORDEN: Un sistema de primer orden es aquel cuya salida y(t) puede ser modelada por una ecuación de primer orden, ya que posee un elemento almacenador de energía y otro que la disipa. Estos circuitos presentan una función de transferencia G(s)= N(s)/(s+a).
SISTEMAS DE SEGUNDO ORDEN: Estos sistemas poseen 2 elementos que almacenan energía y otro(s) que la disipan. Tiene diferentes respuesta a una entrada, estas respuestas se clasifican segun la inercia y el tipo de amortiguamiento. A continuación veremos los tres casos:
CASO 1: SISTEMA SOBREAMORTIGUADO: son los que tienen una respuesta mas lenta.
CASO 2: SISTEMA SUBAMORTIGUADO: son los que presentan la respuesta mas rápida, pero con oscilaciones.
CASO 3: SISTEMA CRÍTICAMENTE AMORTIGUADO: Su tiempo de respuesta es un poco mas rápido que el del sobreamortiguado.
El factor de amortiguamiento es el que indica que tipo de respuesta es la que presenta el sistema. A continuación un diagrama de polos dependiendo del valor de este factor.
Las características tanto estáticas como dinámicas de los instrumentos presentan errores de tipo estático o dinámico.
ERROR ESTÁTICO: Es la diferencia entre las señales de entrada y salida durante el período estacionario o permanente, se lo estudia en el campo complejo ya que se dispone de las transferencias, para ello se utiliza el teorema del valor final. Sea e(t) la función error, se define el error estacionario como:
Un error estático afecta a las señales lentas, por ejemplo de frecuencia inferior a 0,01 Hz.
ERROR DINÁMICO: es la diferencia entre el valor indicado y el valor exacto de la variable medida, siendo nulo el error estático.
Los errores también se pueden clasificar en : graves(humanos),sistemáticos y/o aleatorios.
No hay comentarios:
Publicar un comentario